Deena Soma
Human Factors professional and Occupational Therapist with expertise across varied industries in Australia, New Zealand and the UK. My interests include systems-thinking and cognitive ergonomics.
Human Factors professional and Occupational Therapist with expertise across varied industries in Australia, New Zealand and the UK. My interests include systems-thinking and cognitive ergonomics.
WHO (2023) report road systems globally comprise the highest annual accident fatalities at 1.19 million, largely attributed to human error (UN, 2023). An autonomous road system is seen as the solution using active vehicle safety systems harnessing the benefits of technology. Integration of partially automated vehicles (AVs) into the road system has already begun creating mixed traffic conditions where conventional vehicles and AVs are required to cooperate together safely. Hence, fundamental changes are occurring to the driving task, vehicle design and associated human performance demands where mismatches have resulted in crashes and fatalities. This is likely to continue as AVs evolve and humans continue to learn and adapt. Human factors (HF) methods are well-suited to analyse these crashes and identify learnings. Thereby, preventing re-occurrence and informing safe, human-centred AV development.
A literature review revealed most HF research to date has promoted the benefits of ‘purist’ systems-thinking based approaches for AV accident analysis such as AcciMap (Svedung and Rasmussen, 2002). Though none have focused solely on investigating the driver behavioural factors (DBFs) that lead to crashes. For AV technology to succeed in mitigating human error, deep understanding of how drivers behave and interact with AVs is critical, hence aims were:
A qualitative secondary research strategy with a flexible study design blending case study and grounded theory was applied in two parts using convenience sampling:
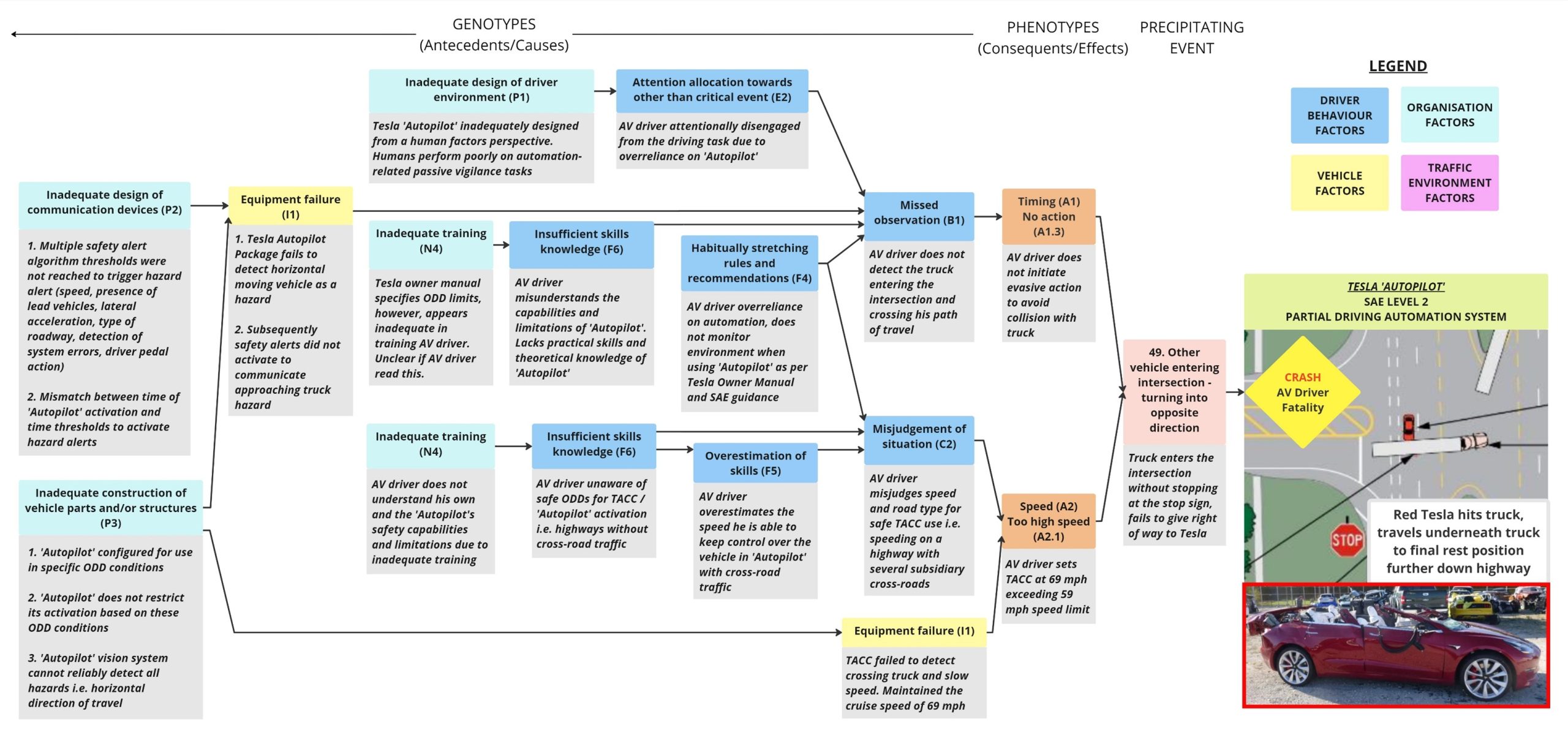
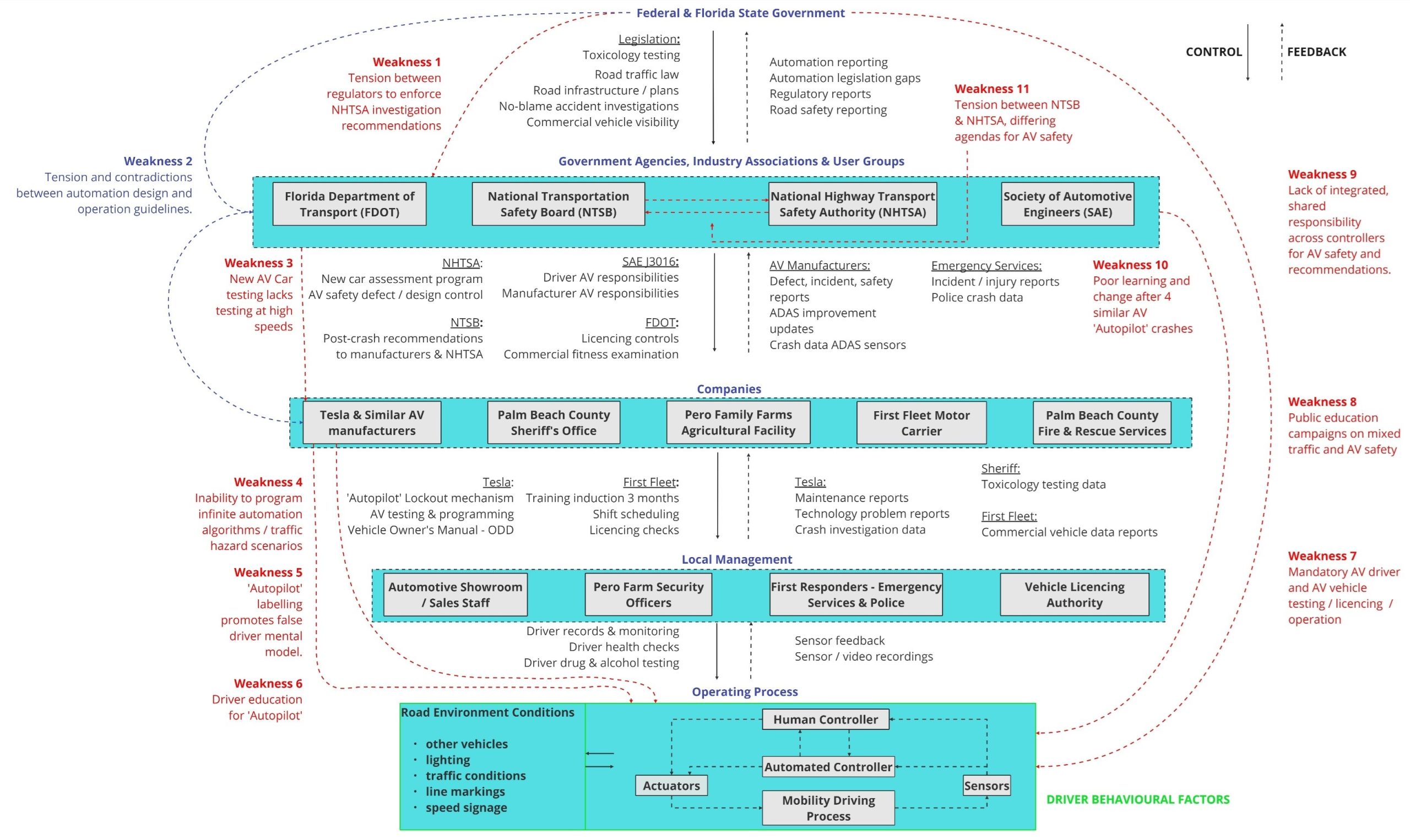
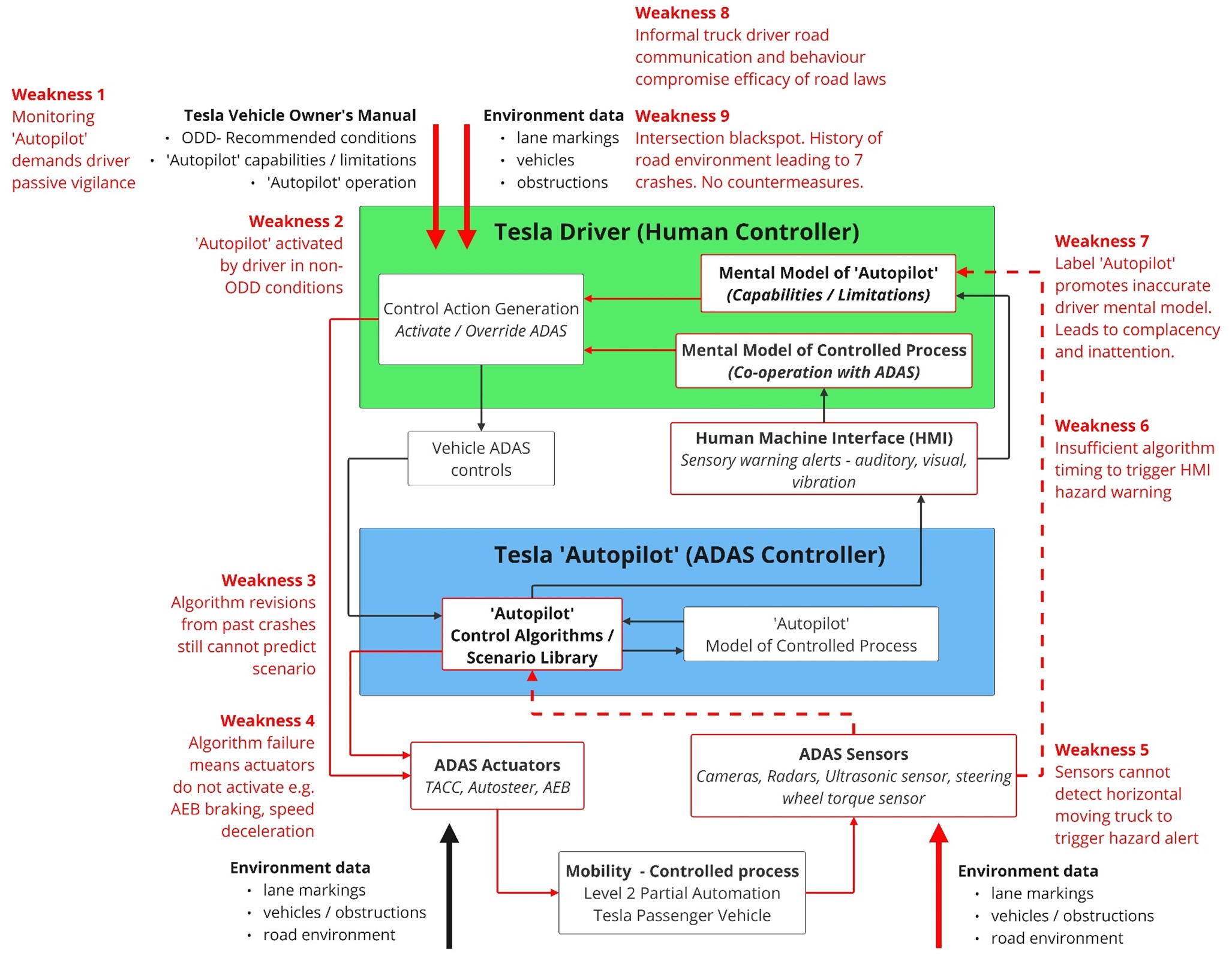
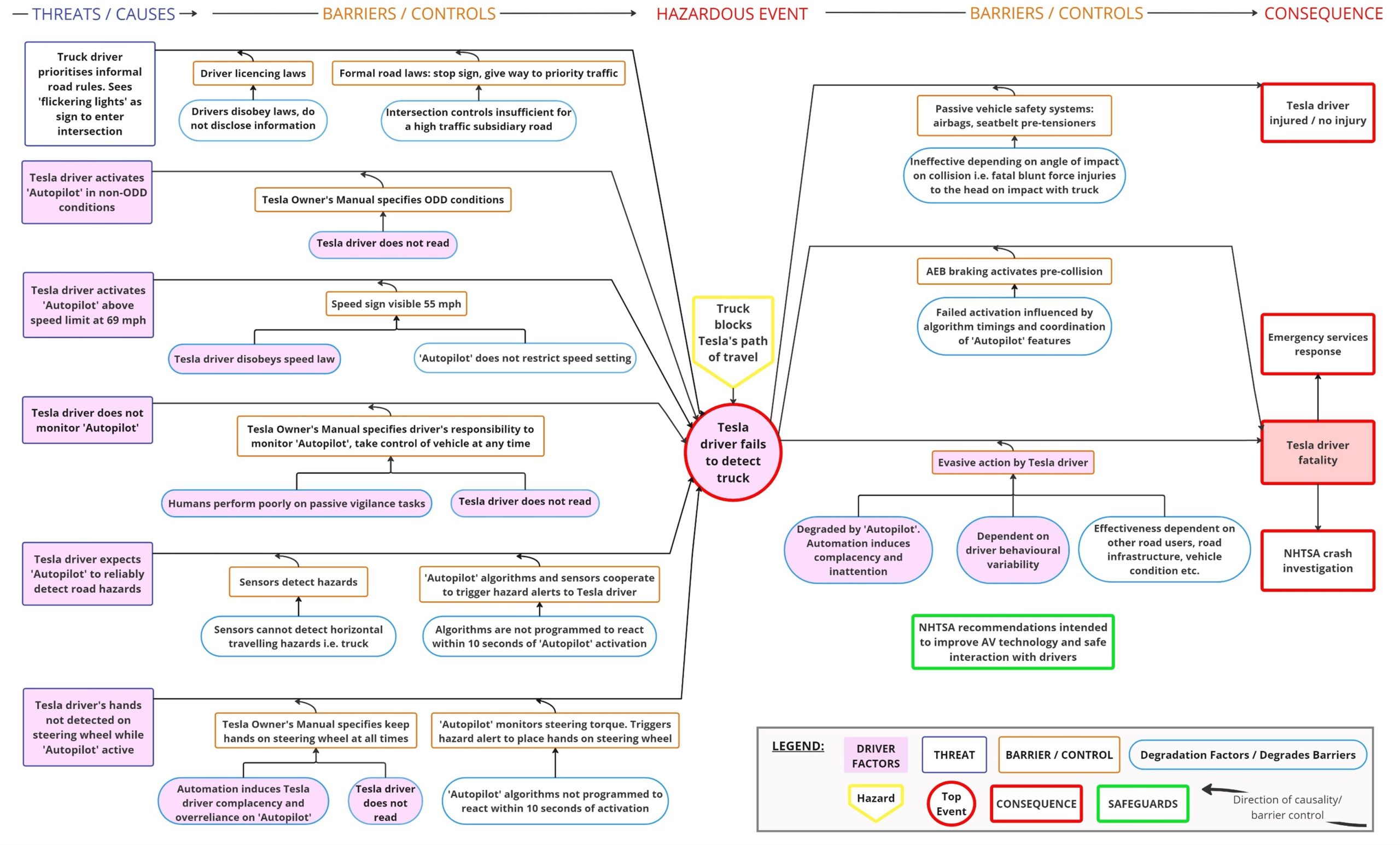
DREAM was the most accurate HF method for analysis of DBFs due to a dedicated DBF taxonomy. STAMP-CAST allowed DBF analysis at the bottom operating process level whereas Bowtie was more difficult to synthesise DBFs as they were scattered throughout.
Aggregate analysis using DREAM showed automation degraded driver observation, interpretation and cognitive states both permanent and temporary leading to crashes. This was related to over-trust in the automation, mental underload, poor mental models and situation awareness. These findings were consistent with long-standing HF automation research.
Most countermeasures developed from DBF data were evaluated as medium efficacy. Many were dependent on whether technology could reach human-level flexibility and intelligence to manage infinite road conflict scenarios; and whether stakeholder commitment to shared responsibility for AV road safety could be achieved.
In an industry setting, DREAM would provide the most detailed learning on driver to AV interactions with moderate resource demands and capability for high-volume crash analysis needs in the road system. In contrast, STAMP-CAST did identify more broad systemic issues, however, was highly time-consuming and complex for a single case. Perhaps best reserved for application in road crash safety-case scenarios where upstream systemic factors require deeper investigation.
The study answered both research aims acknowledging the limitations of a small sample size and sole investigator conducting the analysis. This is the first study to apply the HF method DREAM to AV crash analysis with a focus on DBFs. A unique distinction from other HF research providing a meaningful contribution to the body of knowledge for retrospective AV crash analysis.
DREAM provides a HF lens for large-scale crash investigations for driver to vehicle interactions for both conventional vehicles and AVs. This infers suitability for use by road accident investigation authorities to inform learning, safe AV development and governance.
However, the method requires revision to reflect ADAS developments over the last decade. Countermeasures reflected that to evolve a safe automated future for all, there is need for a safe systems approach and shared responsibility to protect road users from unnecessary harm.
Conversely, findings demonstrated the significant consequences of driver to automation interaction failures in the road system. Extreme technology intelligence demands are necessary for automated road mobility to succeed. As an unpredictable, dynamic and complex sociotechnical system, the study raises the question whether such an autonomous road system will ever eventuate as a reality.